Alterar idioma :
Sistemas de módulos lineares de vários eixos

Sistemas de módulos lineares de 2 eixos, 3 eixos ou sistemas de módulos lineares multiaxiais de 3 eixos ou 4 eixos a partir 1,065.28€
Os sistemas de módulos lineares multiaxiais drylin da igus são pré-fabricados com motores de passo da igus.De acordo com o princípio "construir ou comprar já feito", pode decidir se quer receber o sistema com módulos lineares multiaxiais já montado ou se prefere montá-lo você mesmo.Outra vantagem dos sistemas de módulos lineares multiaxiais da igus: o sistema de controlo está disponível numa caixa de comando completa ou para perfil DIN, dependendo dos seus requisitos.As áreas de aplicação vão desde aplicações de paletização com altas cadências, até aplicações rápidas de pick & place ou colagem de precisão.
- Hardware de controlo plug & play, incluindo software gratuito
- Sistemas módulos lineares multiaxiais standard ou personalizados
- Prazos de entrega curtos
Características técnicas dos sistemas de módulos lineares multiaxiais da igus®
Até 85kg de carga útil
Alcance até 3.000 x 3.000 x 1.000 mm
Até três graus de liberdade
Velocidade máx. 20 recolhas/ mín.
Repetibilidade: ± 0,5mm
Temperatura ambiente 0-50°C
Sistema de controlo de módulos lineares

Com o software de controlo para robôs da igus®, pode testar digitalmente o seu sistema de módulos lineares multiaxiais antes do comprar. Basta programar a sua aplicação.
- Teste toda a cinemática da igus® antes de comprar com o software gratuito e sem licença
- Com projetos pré-programados para todos os robôs igus®, eixos individuais e AGVs
- Interface 3D intuitiva com simulação do robô
Configure o seu Robô Cartesiano à medida

Tem requisitos específicos para os seus robôs cartesianos ou sistemas de módulos lineares? Com o nosso configurador, pode personalizar a sua solução à medida com apenas alguns cliques.
- Download gratuito de ficheiros CAD
- Acessórios compatíveis, como calhas articuladas e pinças
- Interface de configuração intuitiva para decidir tudo num instante
Portais em utilização
Modelos atuais dos sistemas de módulos lineares multiaxiais da igus



Sistemas de módulos lineares multiaxiais standard disponíveis a partir do stock
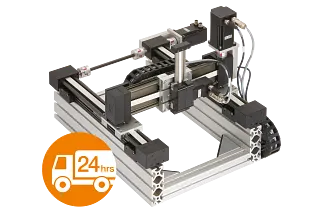
Por vezes, as coisas têm de acontecer rapidamente.Para este caso, temos disponíveis em stock uma gama de sistemas de módulos lineares multiaxiais pré-montados nos tamanhos mais comuns.
O que isto significa para si: O seu sistema linear multiaxial estará pronto a ser enviado a partir de 24 horas.



Programa de formação em Automação Low-cost

O programa de formação em Automação Low-cost oferece-lhe a oportunidade de adquirir rapidamente todo o conhecimento necessário para os de controlo de módulos lineares multiaxiais com a ajuda de tutoriais em vídeo e exercícios .
Aconselhamento personalizado
Terei todo o gosto em esclarecer as suas questões

Envios e consultas
Pessoalmente:
De segunda a sexta-feira, das 9h às 18h - via telefone ou chat
Online:
24h