Alterar idioma :
O software de controlo para robôs da igus
Programar, simular e controlar robôs sem licença
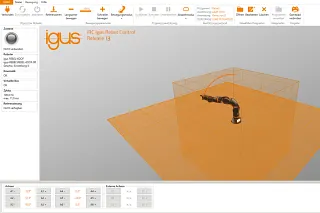
O software de controlo para robôs da igus permite a programação de robôs e o controlo do sistema de forma simples e intuitiva, facilitando a sua iniciação na automação. Graças à estrutura modular, pode ser controlada uma elevada cinemática robótica, como por exemplo, robôs delta, sistemas de módulos lineares multiaxiais e robôs articulados multiaxiais. O software pode ser utilizado para simular os movimentos personalizadas do robô numa superfície 3D – o robô não necessita de estar ligado neste passo.
O que encontrará nesta página
Software gratuito para a programação de robôs
Exemplos de programação de várias aplicações com o software para robôs
- Ligação simples entre o robô e o sistema de controlo
- O funcionamento intuitivo com a interface 3D e os gémeos digitais permite a execução direta e a verificação de sequências de movimento
- Configuração da interface da câmara diretamente através do sistema de controlo e do software
- Programação de robôs delta, lineares, SCARA e braço articulado
- Software permite teste sem riscos mesmo antes da compra
Requisitos do sistema:
- PC com sistema operativo Windows 10
- Comunicação via Ethernet ou WLAN
- 500MB de espaço livre no disco
Programas de amostra, wiki e cursos de formação



Interfaces
Interfaces PLC
A interface PLC (PLC = Controlador Lógico Programável) permite a execução de funções básicas e a sinalização de estados através de entradas e saídas digitais. Para além do controlo por um PLC, esta interface também permite a operação através de botões de hardware.
Entradas e saídas digitais
Os programas do robô podem ser carregados e iniciados e os comandos da garra podem ser enviados através de entradas digitais ou sinais globais. Isto é útil, por exemplo, se for necessário selecionar um programa a partir de uma determinada seleção utilizando botões ou a instruções CRI-GSig.
Modbus TCP/IP
A interface Modbus TCP pode ser usada para enviar dados e instruções PLC para o sistema de controlo do robô e receber informações do estado, por exemplo.
Interface CRI
A interface CRI permite o envio de instruções complexas e a obtenção de informações e definições através da interface Ethernet utilizando TCP/IP. O sistema de comando para robôs da igus utiliza esta interface para se ligar a robôs com um sistema de controlo integrado ou a outras instâncias do sistema de controlo.
Interface da câmara
A interface permite a utilização de câmaras de deteção de objetos e de vídeo. As câmaras de deteção de objetos reconhecem a posição e a classe dos objetos e transmitem-nas, opcionalmente com uma imagem de vídeo, ao sistema de controlo. O sistema de controlo calcula as posições no sistema de coordenadas do robô a partir das posições dos objetos da câmara. As câmaras de vídeo exclusivas apenas fornecem imagens e, por isso, só podem ser utilizadas para monitorizar a área de trabalho, mas não para detetar objetos.
> Obtenha informações mais detalhadas sobre a interface da câmara
Cloud
A interface Cloud permite que o robô seja monitorizado através do RobotDimension. Uma vez ativado e inicia sessão, o robô envia informações básicas sobre o estado e imagens da câmara para o serviço online. O utilizador pode listar os seus robôs no website e recuperar a informação.
ROS, Matlab, LabVIEW e muito mais.
Integrar os robôs no seu ambiente ROS. Documentação e pacotes para comunicação de hardware, Teleop e moveI
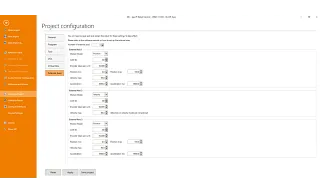
Configurações do projeto
Gripper
A ferramenta instalada pode ser especificada aqui. A alteração da ferramenta requer o recarregamento do projeto ou o reinício do sistema de comando integrado. As novas ferramentas podem ser definidas como um ficheiro de configuração na pasta "Data/Tools"
Caixa virtual
O alcance do movimento do braço robótico é restringido pelas configurações da caixa virtual. Esta funcionalidade ajuda a evitar danos mecânicos e simplifica a programação, dependendo da aplicação. Se for executado um programa que viole a caixa virtual, este é interrompido com uma mensagem de erro.
Eixos externos
O sistema de controlo do robô suporta até 3 eixos adicionais (também chamado "eixos externo" no iRC). Estes podem ser instalados de acordo com os eixos do robô e configurados através da área de configuração do iRC.

Programa
Aqui pode definir o robô e o programa lógico, a velocidade de movimento (em percentagem da velocidade máxima), o modo de reprodução e a reação aos erros do programa.
Cinemática especial
O sistema de controlo para robôs pode ser personalizado para o seu robô com um gémeo digital. Configuramos a cinemática inversa de acordo o seu projeto.
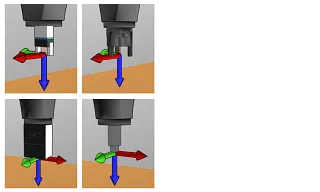
Programação
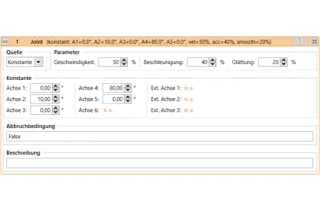
Movimentos dos eixos
O comando Joint move o robô para uma posição alvo absoluta que é especificada em coordenadas de eixos (por exemplo ângulo do eixos ou posição de um eixo linear). O movimento resultante do TCP é normalmente uma curva e não uma linha reta.
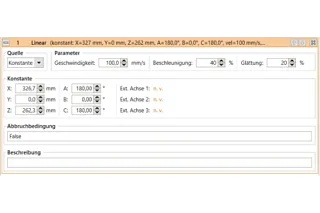
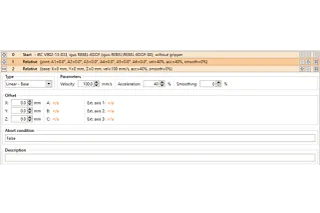
Movimento linear
O comando Linear move o robô para uma posição alvo absoluta especificada em coordenadas cartesianas. O movimento resultante do TCP segue uma linha reta.
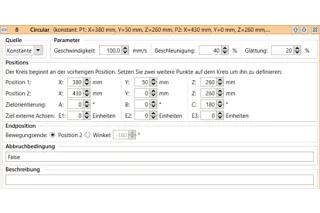
Movimentos circulares
A instrução "Movimento circular" permite movimentos ao longo de um percurso circular completo ou parcial. É compatível com movimentos lineares, pelo que a transição de e para movimentos lineares pode ser suavizada.
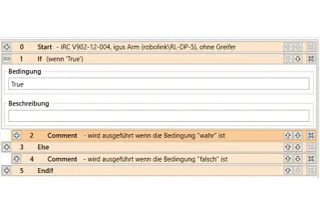
Condições
As condições podem ser utilizadas em comandos if-then-else, loops e como condições de cancelamento em comandos de movimento. As condições podem ser combinações de entradas digitais, sinais globais, operações booleanas e comparações.
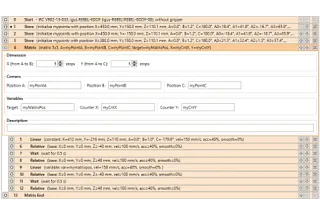
Cálculo da matriz
As instruções da grelha calculam as posições alinhadas com a grelha, por exemplo, como uma posição de agarrar ou colocar para tarefas de paletização.
Relativo
O comando Relativo permite-lhe mover o robô relativamente à sua posição atual. Pode ser acedido através dos menus em "Ação" → "Movimento relativo".

Subprogramas
Os subprogramas podem ser chamados com o subcomando. O caminho para o ficheiro do subprograma é especificado em "Nome do ficheiro". É relativo à subpasta "Programas" da pasta "Dados" do iRC.
Variáveis e acesso a variáveis
Dois tipos de variáveis são suportadas no programa de controlo para robôs e TinyCtrl da igus:
- Variáveis numéricas: Podem ser usadas para armazenar números de pontos inteiros ou flutuantes.
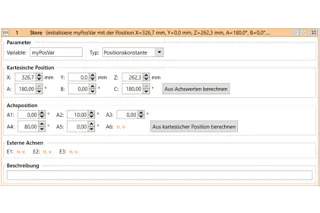
- Variáveis de posição: podem ser utilizadas para armazenar posições cartesianas e posições relacionadas. A interpretação de uma variável como uma posição cartesiana ou posição conjunta depende do contexto.
Descarregue gratuitamente o software de controlo para robôs da igus

O software igus Robô Control sem necessidade de licenças está integrado no sistema de controlo e, portanto, utiliza um conceito operacional padronizado e serviços de comunicação consistentes para muitos componentes de um sistema. Isto traduz-se em menos trabalho na fase de planeamento do projeto e num arranque mais rápida.
- Teste toda a cinemática da igus antecipadamente no software
- Com projetos pré-programados para todos os robôs da igus, eixos individuais e AGVs
- Interface 3D intuitiva com simulação do robô
Aconselhamento personalizado
Terei todo o gosto em esclarecer as suas questões

Envios e consultas
Pessoalmente:
De segunda a sexta-feira, das 9h às 18h - via telefone ou chat
Online:
24h