Recolha em tapetes transportadores - CPR
O que era necessário:
robô "pick & place" para tapetes rolantes com câmara
Requisitos:
solução tudo-em-um económica e fácil de integrar
Material:
sistema de módulos lineares multiaxiais, sistema de controlo para robôs e câmara
Indústria:
indústria cosmética
Sucesso para o cliente:
solução coordenada sem esforço complexo de integração
robô "pick & place" para tapetes rolantes com câmara
Requisitos:
solução tudo-em-um económica e fácil de integrar
Material:
sistema de módulos lineares multiaxiais, sistema de controlo para robôs e câmara
Indústria:
indústria cosmética
Sucesso para o cliente:
solução coordenada sem esforço complexo de integração

Ir para a aplicação
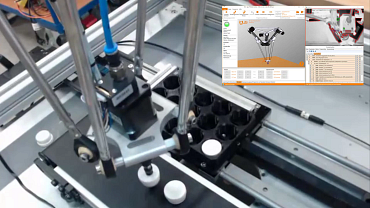
Todas os tapetes transportadores têm (quase) sempre um robô delta.Neste caso, os frascos de creme são separados em embalagens blister na indústria cosmética. Uma aplicação típica de "pick & place" é no final do processo de fabrico.
O problema:
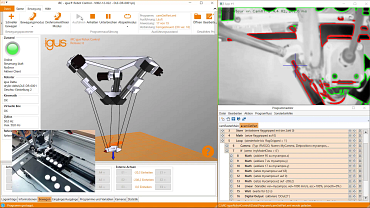
Uma vez que os frascos são detetados em função da sua posição e têm de ser rodados, o sistema de visão com câmaras regista tanto a posição no tapete como a posição do gargalo. O sistema deve ser capaz de atingir uma velocidade elevada tanto na deteção como na tarefa de "pick & place".A solução
A aplicação consiste num tapete transportador, um robô delta de 3 eixos, um sistema de visão com câmara e o sistema de controlo para robôs da igus, que combina todos os elementos no software e torna possível uma aplicação de "pick & place" automática.
Loja de automação low-cost
Robótica económica para o seu projeto de automação
Pode encontrar o robô certo para a sua aplicação individual na nossa loja online.Pesquise, obtenha informações e encomende facilmente.
Ir para a loja
