Robôs educativos - HTBLuVA Salzburgo
O que era necessário:
braço robótico fácil de controlar
Requisitos:
económico, modular, precisão no intervalo de 0,1 mm
Material:
robolink RL-DC-5
Indústria:
educação/ensino
Sucesso para o cliente:
braço robótico económico que pode ser facilmente integrado num conceito global existente com um sistema de controlo de terceiros
braço robótico fácil de controlar
Requisitos:
económico, modular, precisão no intervalo de 0,1 mm
Material:
robolink RL-DC-5
Indústria:
educação/ensino
Sucesso para o cliente:
braço robótico económico que pode ser facilmente integrado num conceito global existente com um sistema de controlo de terceiros

Ir para a aplicação
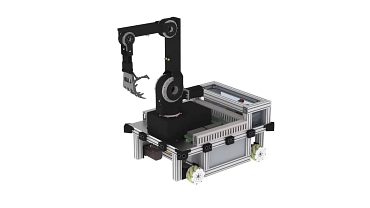
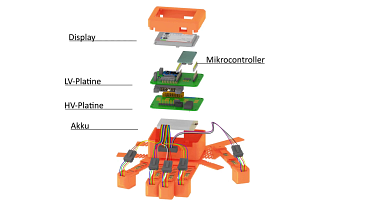
A HTBLuVA Salzburg desenvolveu esta colaboração homem-robô com um sistema de controlo gestual/mímica como parte de um projeto educacional. Ao utilizar o AGV em combinação com o braço robótico que inclui " garras com dedos", foi criado um robô versátil.O problema:
Para projetos deste tipo, são necessários componentes excecionalmente económicos, que, no entanto, têm a maior interoperabilidade possível para que vários conjuntos possam interagir.Neste caso, tanto o AGV para se deslocar no espaço de trabalho como o braço robótico, incluindo a garra, tiveram de ser controlados através da luva háptica.
A solução
Um robolink DC económico (modelo de 5 eixos) incluindo o sistema de controlo de motores da B&R, em combinação com um AGV, uma garra e uma luva que fornece feedback háptico.
O configurador robolink
Conheça o nosso configurador online
Com os nossos configuradores online intuitivos, pode criar o seu próprio braço robótico articulado robolink com apenas alguns cliques. Rápidos, personalizados e com preços fixos.Descubra agora a liberdade ilimitada com as nossas ferramentas.
Ir para o configurador

Loja de automação low-cost
Robótica económica para o seu projeto de automação
Pode encontrar o robô certo para a sua aplicação individual na nossa loja online.Pesquise, obtenha informações e encomende facilmente.
Ir para a loja
